
Sponsor:Ford-MIT Alliance
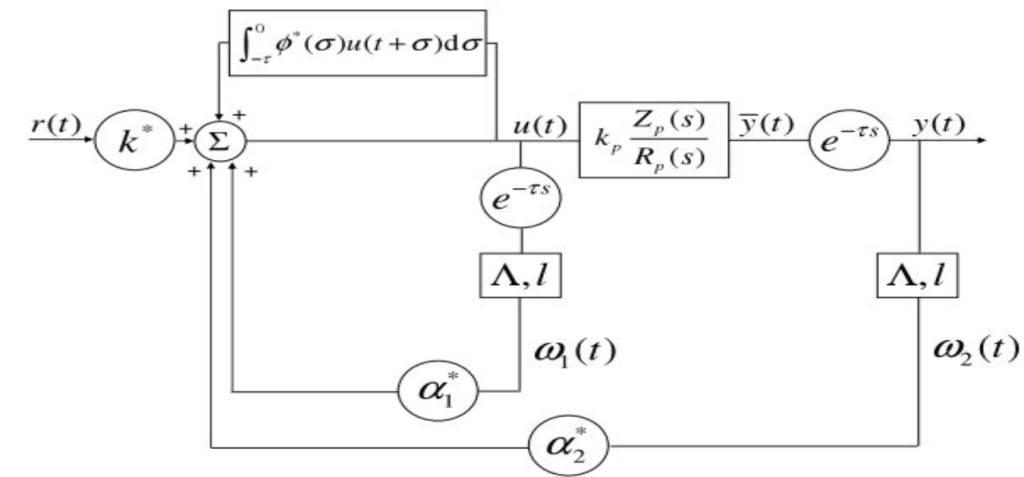
In this research, we developed an Adaptive Posicast Controller that deals with parametric uncertainties in linear systems with delays. It was assumed that the plant has no right half plane zeros and the delay is known. The adaptive controller was based on the Smith Predictor and Finite Spectrum Assignment with time-varying parameters adjusted online. A novel Lyapunov–Krasovskii functional was used to show semi-global stability of the closed-loop error equations. The controller was applied to automotive control problems. The implementation results showed that the Adaptive Posicast Controller significantly improves the closed-loop performance when compared to the case with the existing baseline controller.

