
Collaborators: Northeastern University, University of South Florida
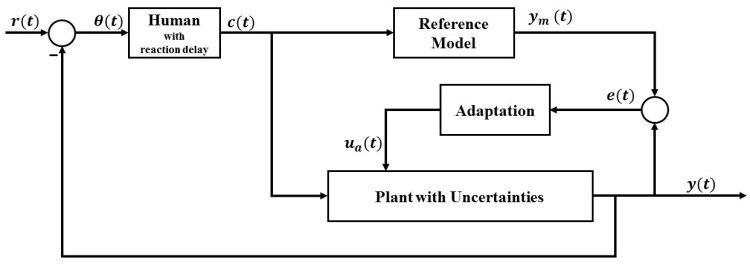
In this research, we study human-in-the-loop control systems from the points of stability and performance. While providing rigorous mathematical analysis, our aim is to develop a framework for human-controller interaction analysis capable of providing us with complete description of the human-in-the-loop control architectures, regardless of the incorporated human model. This framework has certain applications in numerous fields including, but not limited to, telerobotics, robotics, and flight control.

