
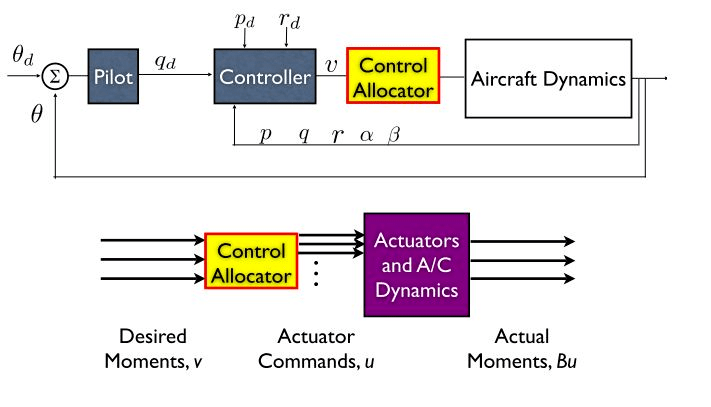
In this research, we developed a control allocation technique that help pilots recover from pilot induced oscillations (PIO). When actuators are rate-saturated due to aggressive pilot commands, high gain flight control systems or some anomaly in the system, the effective delay in the control loop may increase depending on the nature of the cause. This effective delay increase manifests itself as a phase shift between the commanded and actual system signals and can instigate PIOs. The proposed control allocator reduces the effective time delay by minimizing the phase shift between the commanded and the actual attitude accelerations. This allocator, which we named as CAPIO (Control Allocator to recover from Pilot Induced Oscillations) distinguishes itself as being one of the first PIO recovery system designed for Multi Input Multi Output Systems without the need for ganging the actuators. After simulation studies, CAPIO was successfully tested with real pilots at Vertical Motion Simulator at NASA Ames Research Center.

